
Aggressive Autonomous Control on Snow and Ice
Published in SAE Technical Paper (No. 2025-01-8040), SAE International, 2025., 2025
Testing Video
Aggressive driving on dirt.
Aggressive driving on snow and ice.
Aggressive drifting.
Motivation
In cold and snowy regions, vehicles encounter low-friction, non-uniform road surfaces, significantly complicating control dynamics. Manual driving under these conditions becomes highly demanding and risk-prone, as traction loss and unpredictable terrain degrade stability and maneuverability. To systematically investigate these challenges, this study explores two critical questions:
- What are the performance limits of vehicle motion on snow and ice when operating at the edge of handling?
- How much does performance degrade on low-friction surfaces compared to dirt?
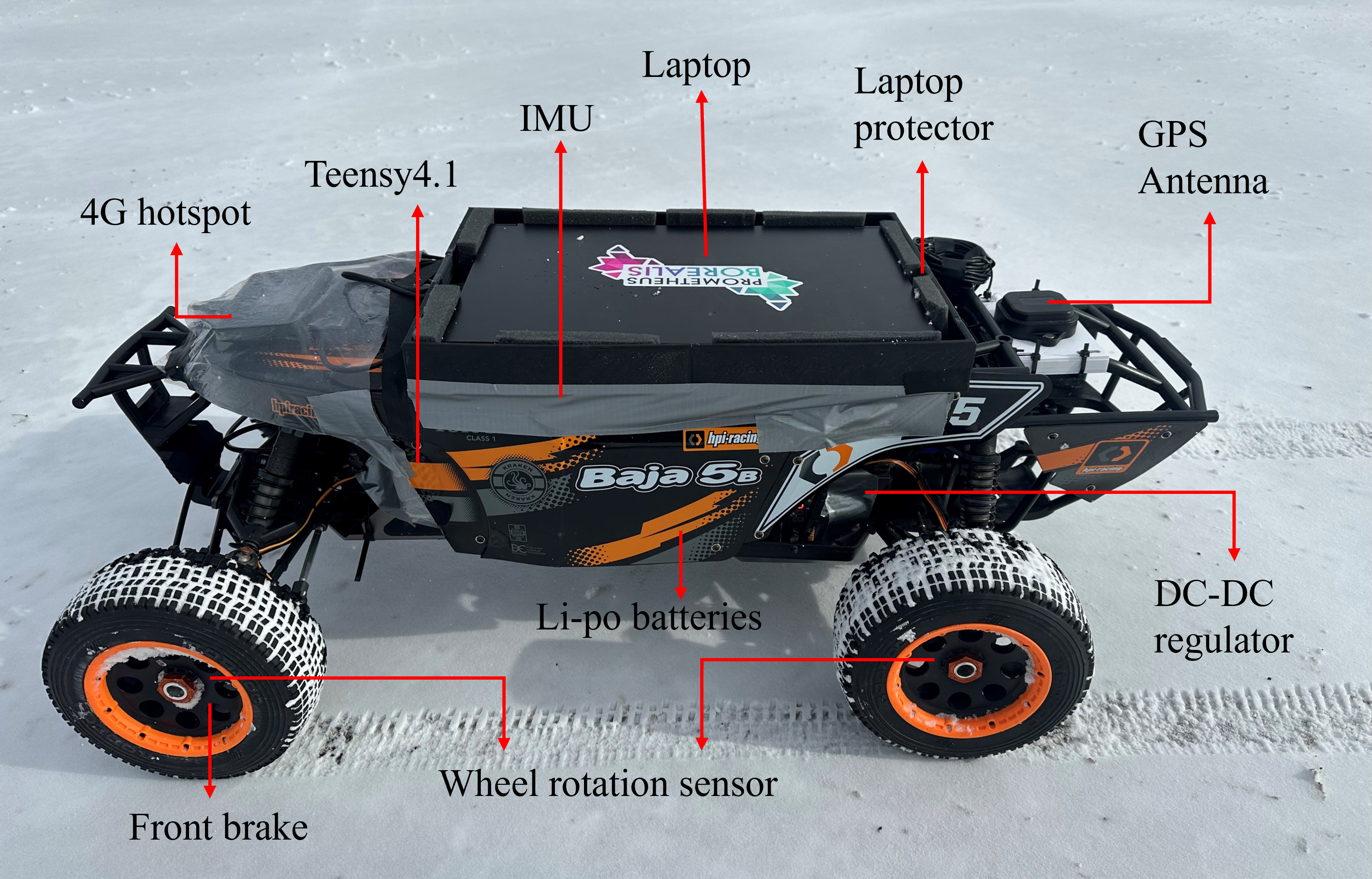
Testing platform
It’s built based on a 1:5 scale Baja 5B RC car. Ublox c099-F9P GPS and Lord 3DM-GX3-25 IMU are selected for localization. The GPS Antenna is located on a 3D-printed support bracket at the rear of the car so as not to be obscured by other parts. The IMU is mounted on rubber bumpers on a sturdy metal plate inside the middle of the car. To get an RTK GPS signal, a 4G hotspot is attached to the front of the shell, Real Time Correction Messages (RTCM) can be received to enable RTK measurement.
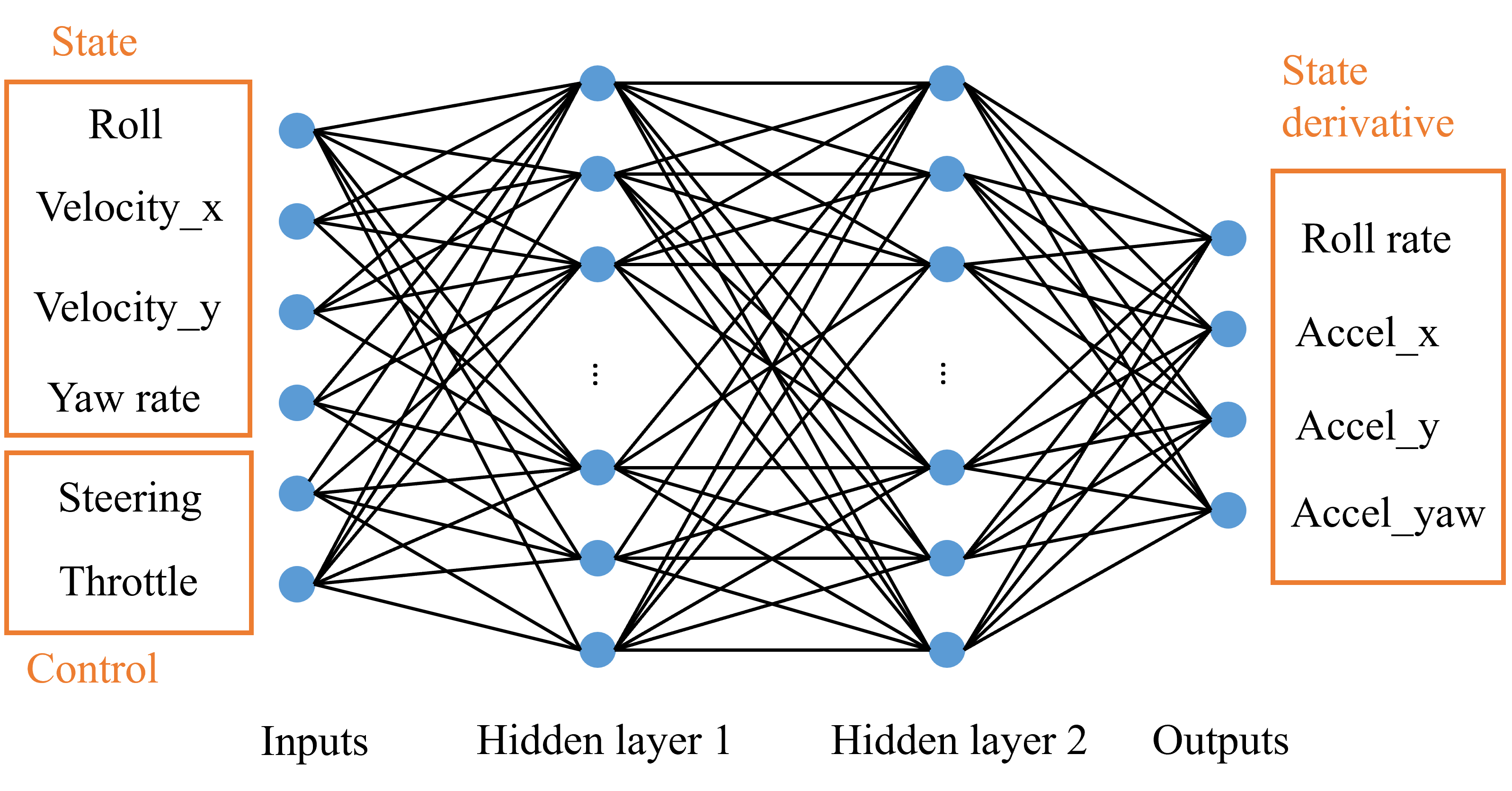
Vehicle dynamics
It’s hard to measure or estimate the parameters of a high-fidelity vehicle model. We follow the same modeling process in AutoRally, a fully connected neural network to represent the vehicle dynamics.
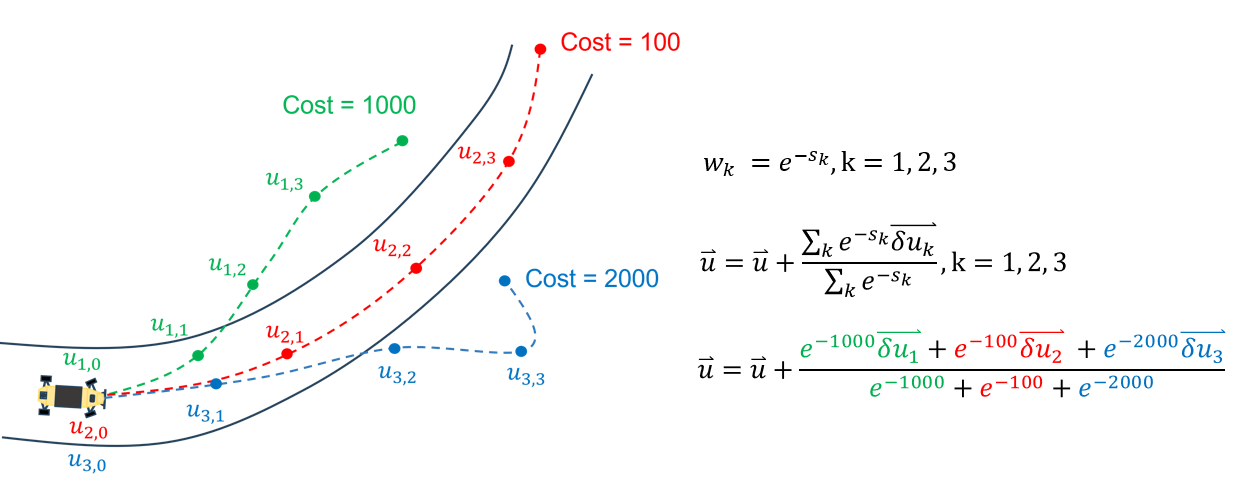
Controller
Model Predictive Path Integral (MPPI) is a sampling-based controller that can handle discontinuous cost functions. Unlike gradient-based methods, it does not rely on derivatives, enabling compatibility with a wide variety of system dynamics—including neural networks.
Paper
For more details, the paper can be found here.