
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
SAE Autodrive Challenge II year 2 - 5
Graduate Teaching Assistant (GTA) for SAE Autodrive Challenge II. 
The Railroad Crossing Vehicle Warning (RCVW) system
Real-world deployment of a V2X safety warning system. Validated low-latency communication between crossings and cars at active Highway-Rail Grade Crossings.
Integration of Unmanned Aerial Systems Data Collection Into Day-to-Day Usage for Transportation Infrastructure – A Phase III Project
Processed and analyzed large-scale drone imagery for transportation infrastructure assessment. Established data pipelines for training deep learning traffic models.
![]()
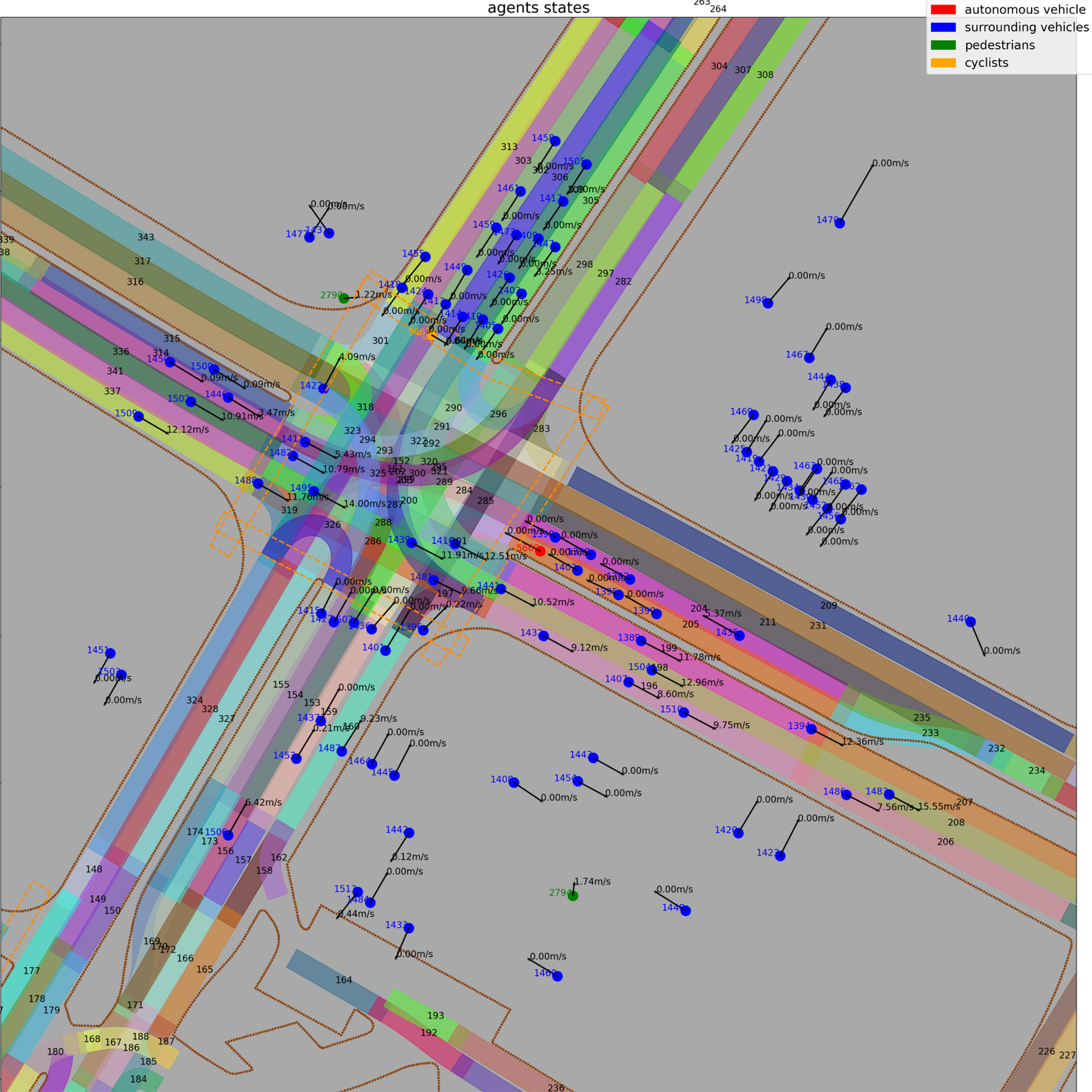
Microscopic Traffic Safety Analysis and macro-level transportation analysis
Performed multi-scale traffic analysis, combining microscopic safety metrics with macroscopic transportation trends.
From OSM to VISUM: Automated Infrastructure Generation for Transport Planning
Developed an automated Python toolchain to convert OpenStreetMap (OSM) data into VISUM networks, streamlining macroscopic transport planning and demand modeling.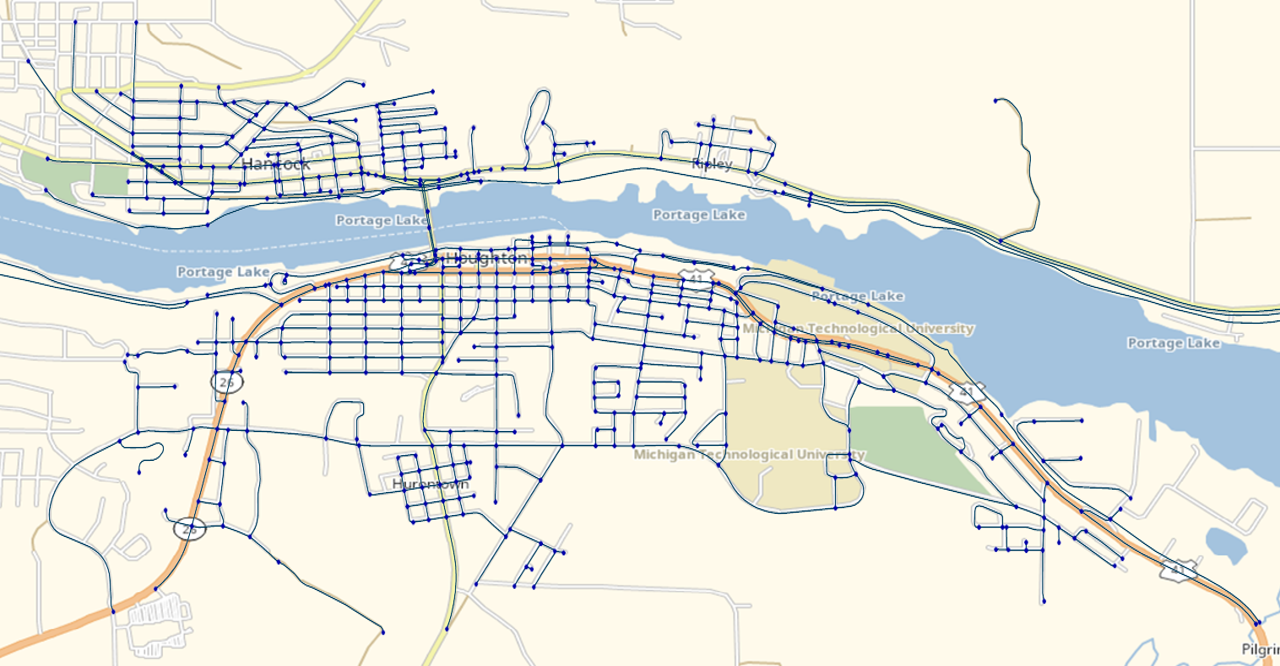
From OSM to VISSIM: Automating Large-Scale Traffic Network Modeling
Engineered a pipeline to generate high-fidelity VISSIM road networks from OSM data, enabling rapid setup of large-scale microscopic traffic simulations.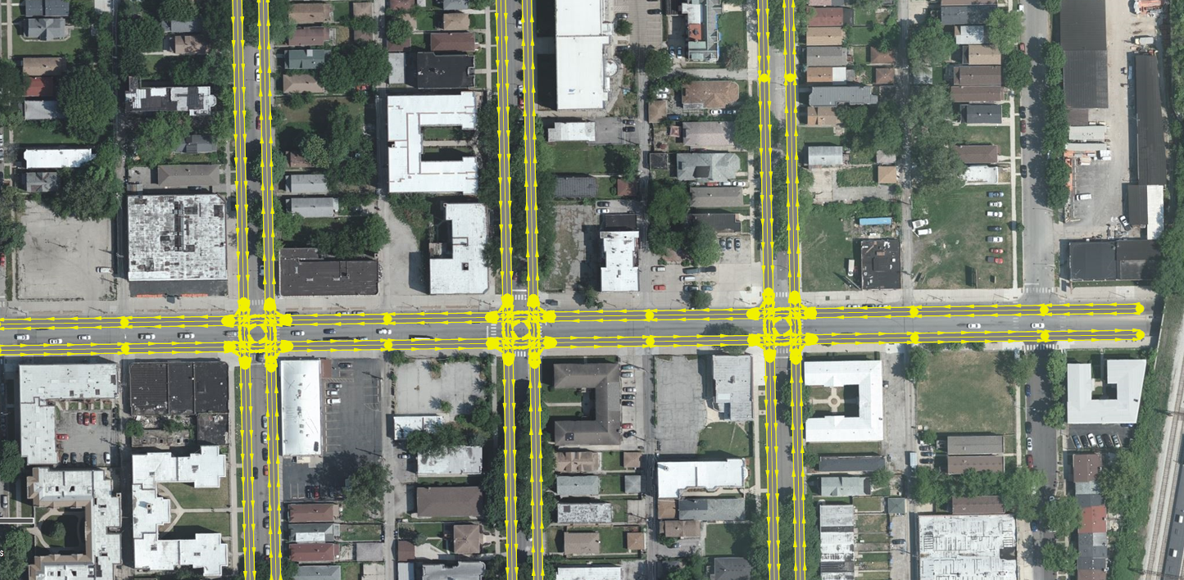
Project: Research on Construction and Site Testing Technology of Closed Test Environment for Auto-driving Electric Vehicles
Developed and validated CAN bus communication for Electric Autonomous Vehicle.
Project: QLTD Intelligent and Connected Expressway Testbase construction
Autonomous control and V2X development for AV platoon.

Project: Key technologies for driverless commercial vehicle control systems
Designed robust motion control systems for Internal Combustion Engine (ICE) commercial platforms.
publications
Constrained optimization and distributed model predictive control-based merging strategies for adjacent connected autonomous vehicle platoons
Published in IEEE Access, vol. 7, 2019
H. Min, Y. Yang, Y. Fang, P. Sun and X. Zhao, “Constrained Optimization and Distributed Model Predictive Control-Based Merging Strategies for Adjacent Connected Autonomous Vehicle Platoons,” in IEEE Access, vol. 7, pp. 163085-163096, 2019, doi: 10.1109/ACCESS.2019.2952049.
Aggressive Autonomous Control on Snow and Ice
Published in SAE Technical Paper (No. 2025-01-8040), SAE International, 2025., 2025
Yiming Yang and Jeremy P. Bos. Aggressive Autonomous Control on Snow and Ice. No. 2025-01-8040. SAE Technical Paper, 2025.
Tracking the Invisible: Self-Supervised Wheel Track Detection with Thermal-RGB Fusion
Published in IEEE/RSJ International Conference on INTELLIGENT ROBOTS \& SYSTEMS (IROS), 2026
Yiming Yang, Jeremy P. Bos
Beyond the Snowflakes: Disentangling Weather Effects from Confounding Meta-Factors in LiDAR Object Detection
Published in IEEE/RSJ International Conference on INTELLIGENT ROBOTS \& SYSTEMS (IROS), 2026
Yiming Yang, Jeremy P. Bos
Geometric and Radiometric Enhancements of Vehicles in LiDAR Point Clouds with Snow Accumulation
Published in IEEE International Workshop on Metrology for Automotive (IEEE MetroAutomotive 2026), 2026
Yiming Yang, Jeremy P. Bos
talks
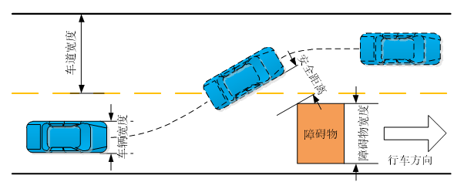
Presentation: Research on Automatic Emergency Line Change Control Strategy Based on MPC
Published:

- Abstract:
In this work, we showcase the performance of a Model Predictive Controller (MPC) in lane change scenario.
- Methods:
We estibasilshed the vehicle dynamic model and conducted simulation.
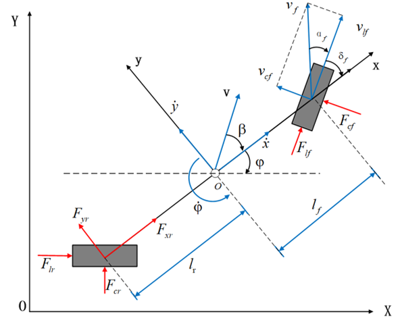
- Results: Simulation.
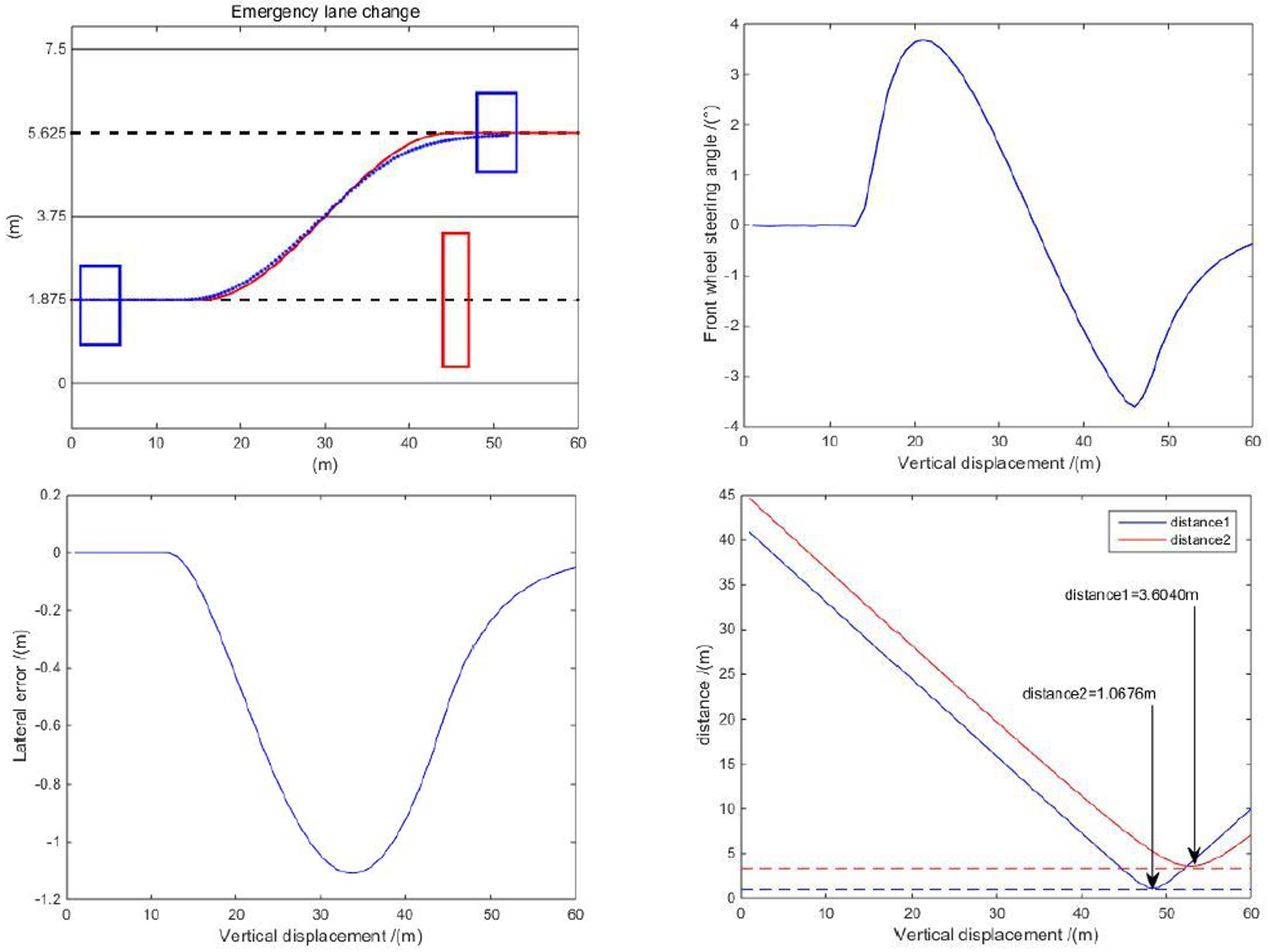
Real car testing was conducted.

Presentation: Deep Deterministic Policy Gradient based Cooperative Platoon Logitudinal Control Strategy
Published:
Note: This work was reviewed and recommended for presentation at the TRB Annual Meeting 2021 by the TRB committee, not presented due to COVID-19
Presentation: Aggressive Autonomous Control on Snow and Ice
Published:

- Abstract:
In this work, we showcase the performance of a Model Predictive Path Integral (MPPI) Controller in adverse weather conditions with our 1:5 testing platform: CODMAX
- Methods:
We applied the MPPI controller used in AutoRally, tested the car on three diferent surfaces (dirt, snow, ice) to explore how much performance degradation due to lower friction.
- Results:
The table below shows the test results.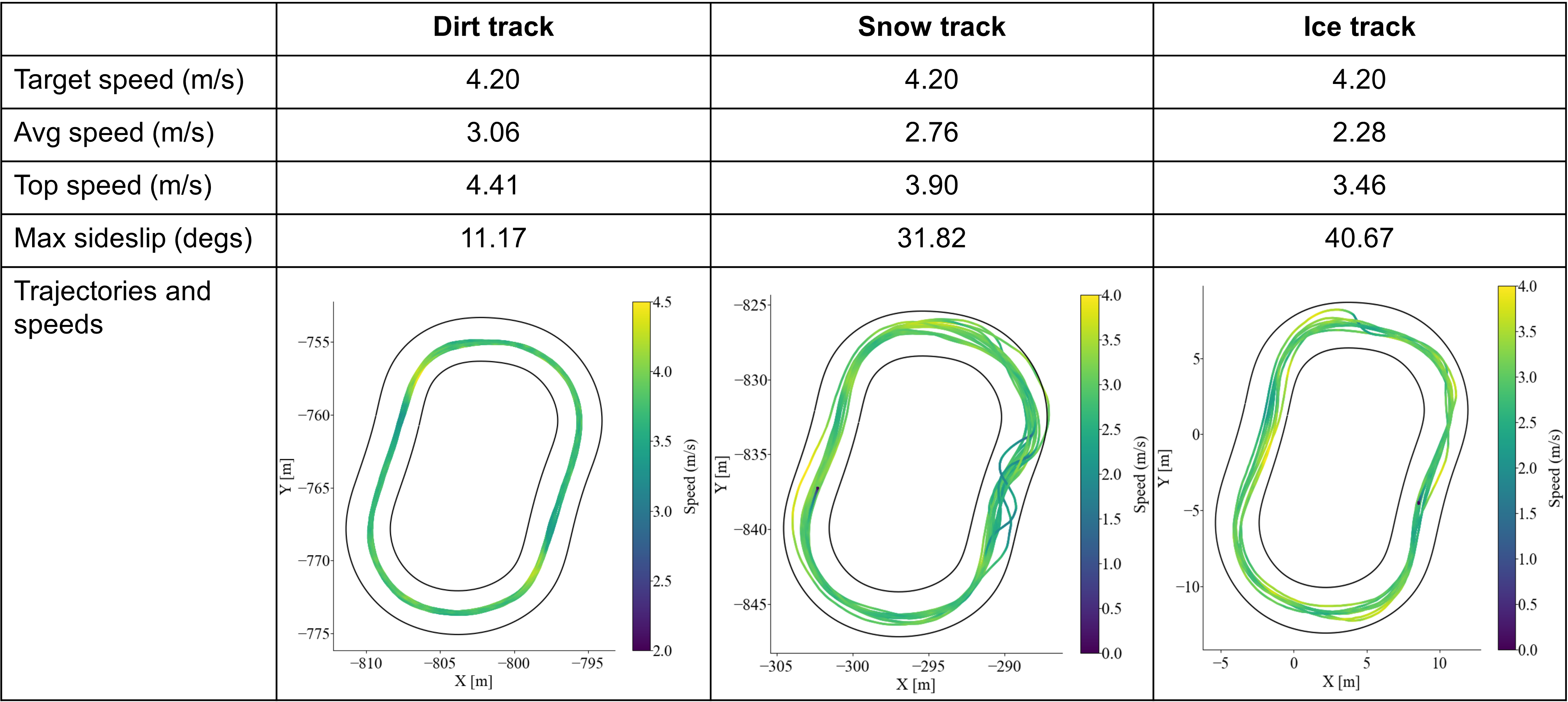
- Download:
The paper can be found here. The slides can be downloaded here
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.