SAE Autodrive Challenge II year 2 - 5
Graduate Teaching Assistant (GTA) for SAE Autodrive Challenge II. 

Graduate Teaching Assistant (GTA) for SAE Autodrive Challenge II.
Real-world deployment of a V2X safety warning system. Validated low-latency communication between crossings and cars at active Highway-Rail Grade Crossings.
Processed and analyzed large-scale drone imagery for transportation infrastructure assessment. Established data pipelines for training deep learning traffic models.
![]()
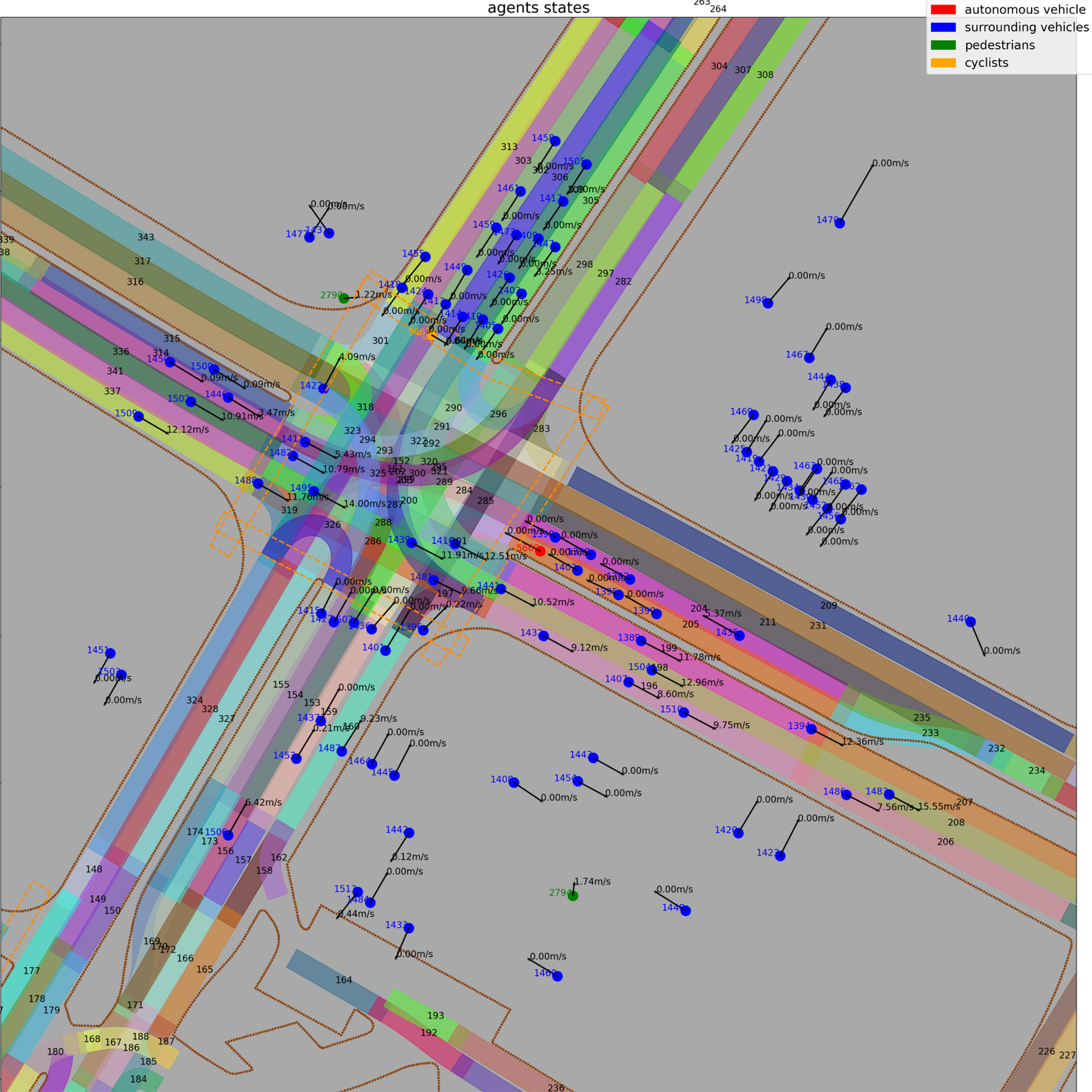
Performed multi-scale traffic analysis, combining microscopic safety metrics with macroscopic transportation trends.
Developed an automated Python toolchain to convert OpenStreetMap (OSM) data into VISUM networks, streamlining macroscopic transport planning and demand modeling.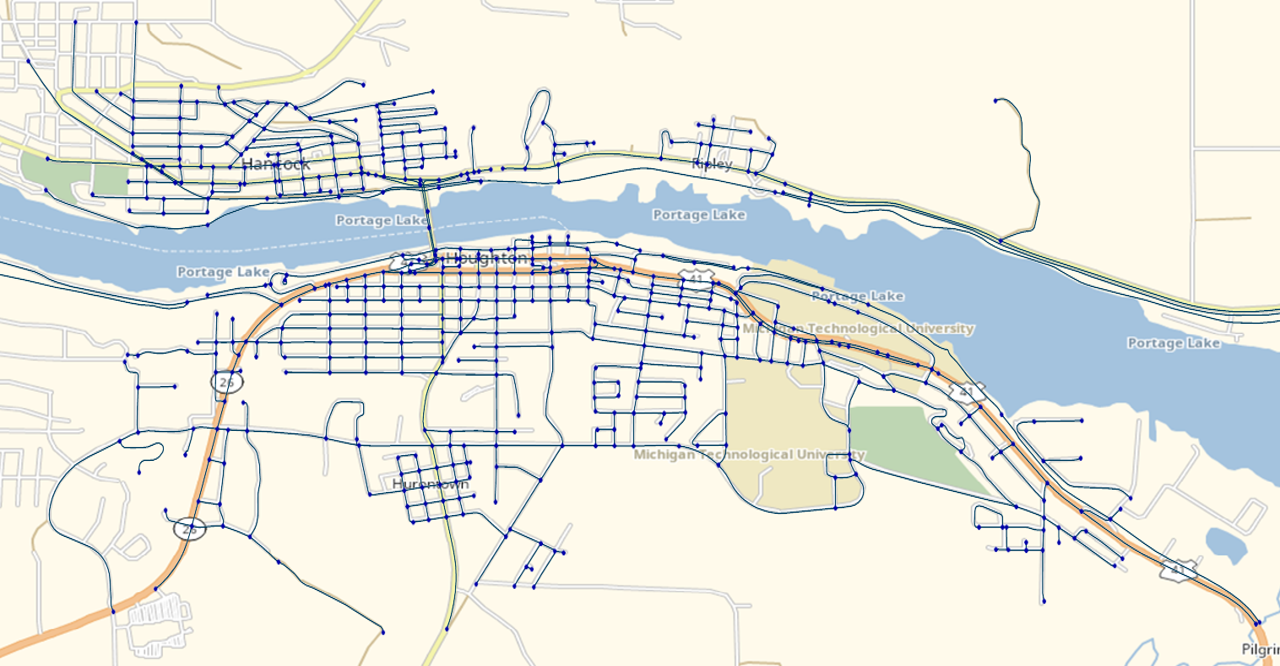
Engineered a pipeline to generate high-fidelity VISSIM road networks from OSM data, enabling rapid setup of large-scale microscopic traffic simulations.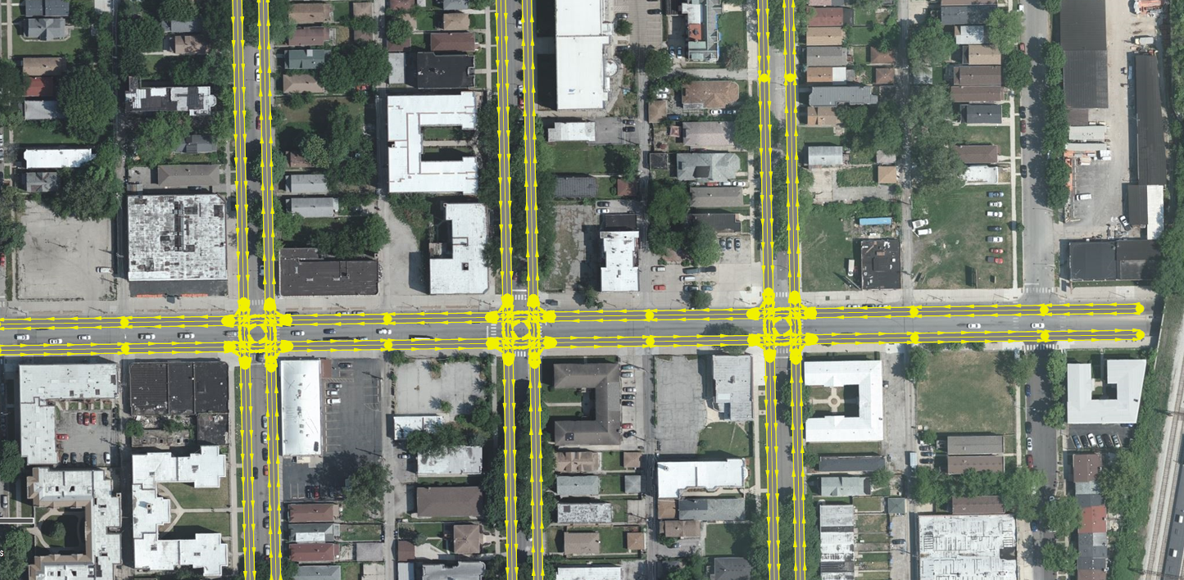
Developed and validated CAN bus communication for Electric Autonomous Vehicle.
Autonomous control and V2X development for AV platoon.

Designed robust motion control systems for Internal Combustion Engine (ICE) commercial platforms.