
Beyond the Snowflakes: Disentangling Weather Effects from Confounding Meta-Factors in LiDAR Object Detection
Published in IEEE/RSJ International Conference on INTELLIGENT ROBOTS \& SYSTEMS (IROS), 2026
Motivation
Prior research on LiDAR-based 3D object detection in snow relies heavily on coarse qualitative assessments and treats deep learning models as black boxes, failing to distinguish whether performance drops stem directly from snowfall or from confounding environmental factors. To address this ambiguity, we introduce WADS-3D, which pairs LiDAR data with granular, high-rate snowfall intensity measurements to benchmark ten diverse detectors. By applying a rigorous multivariate analysis framework, we disentangle the true impact of snow from correlated object and scene meta-information, offering the first systematic assessment of perception robustness in continuous weather degradation.
Datasets
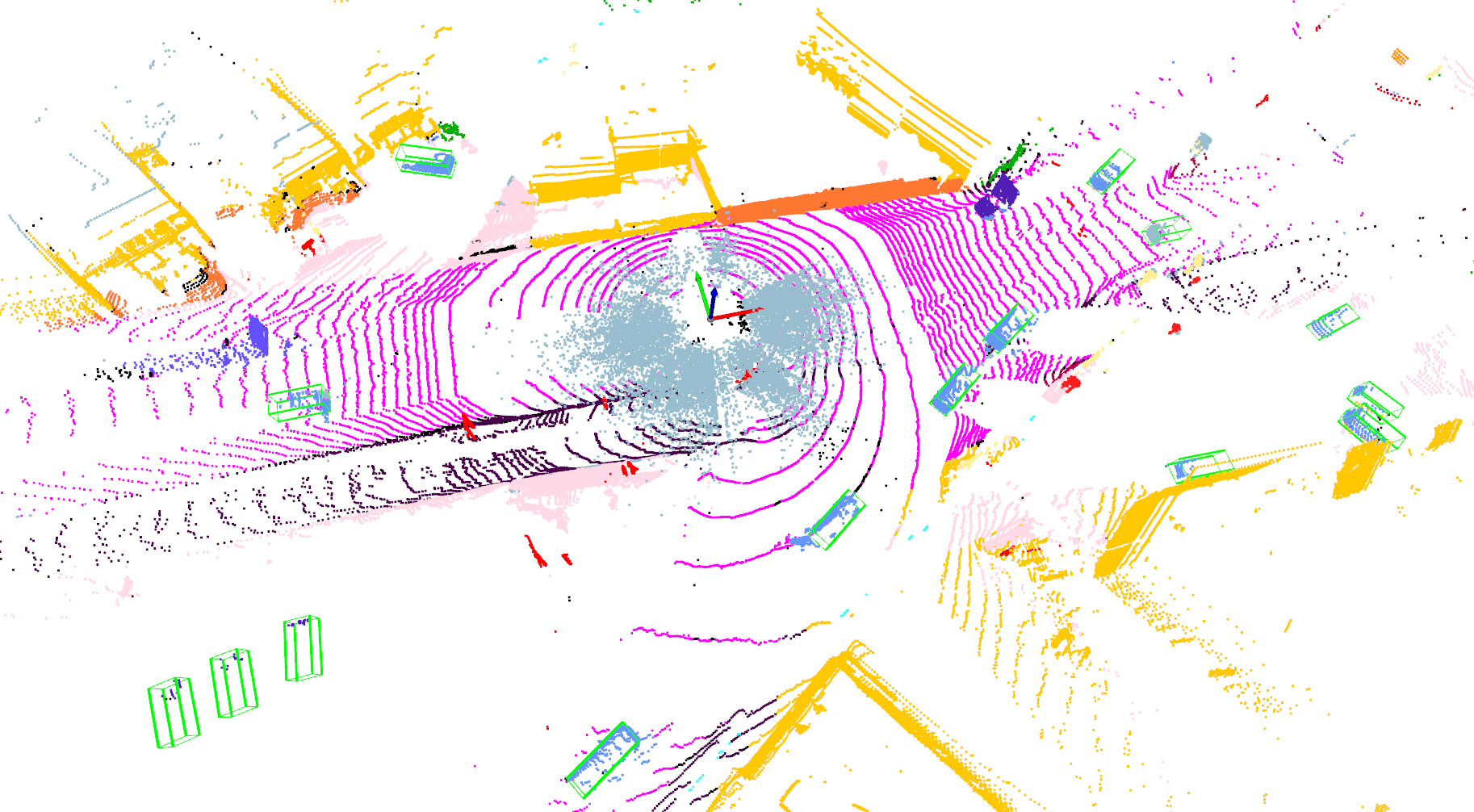
To facilitate research on 3D object detection in adverse weather, we introduce the WADS-3D dataset. Following the standard KITTI format, the dataset comprises 4,100 labeled frames, which were generated by rotating 2,050 unique 360-degree labeled scans to effectively double the dataset size while adhering to KITTI’s forward-view requirements. It contains 30,104 labeled cars, focusing exclusively on this class due to the scarcity of pedestrians and cyclists in the collected snowy scenes.
Snowfall intensity Classification
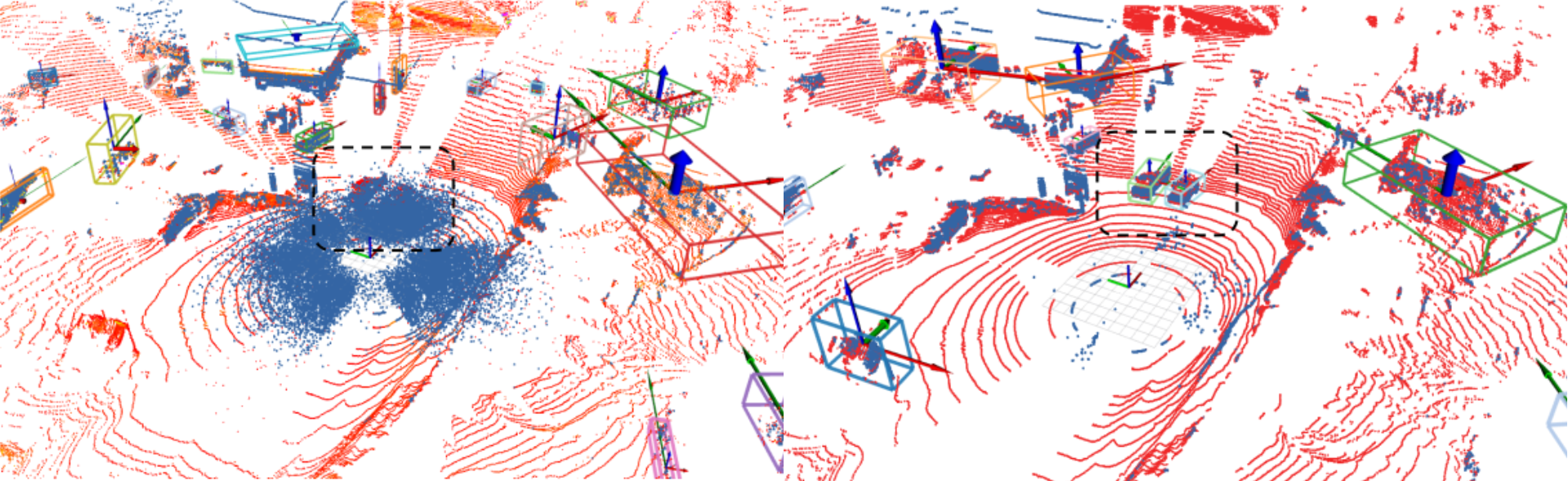
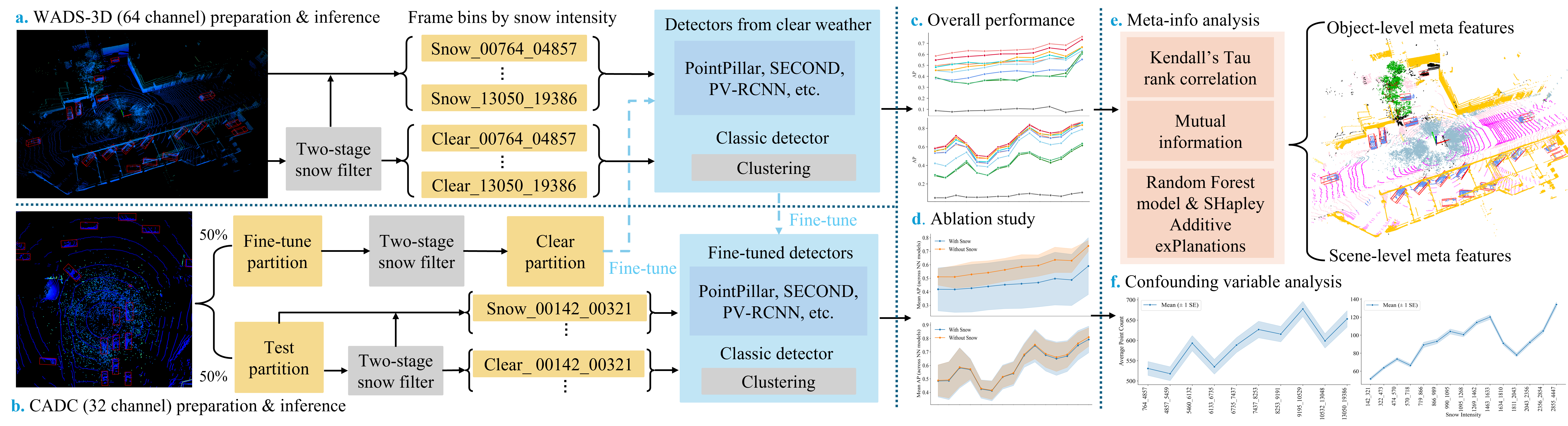
To quantify sensor degradation, we implemented a hybrid filtering pipeline combining Dynamic Statistical Outlier Removal (DSOR) and Low-Intensity Outlier Removal (LIOR) to accurately estimate the number of falling snow points within the forward-facing view. Using these counts as a direct proxy for precipitation density, we stratified the WADS-3D and CADC datasets via a flexible quantile binning approach. This methodology mitigates sensor-proximal artifacts and ensures balanced ground truth distribution across intensity levels, enabling a systematic analysis of detection performance under continuous weather degradation.
Methods
We evaluated one classic and nine neural network detectors sourced from OpenPCDet and MMDetection3D using two distinct strategies tailored to sensor characteristics. For WADS-3D, we assessed zero-shot generalization by applying models pre-trained exclusively on clear-weather KITTI data. For CADC, we implemented a fine-tuning protocol where models were trained on snow-filtered data to bridge the domain gap, but evaluated on raw precipitation frames to preserve the realistic challenge of adverse weather conditions.
DataSet
WADS-3D dataset will be released soon.
We derived our WADS-3D dataset by utilizing WADS, a specialized dataset designed for autonomous vehicles and robot research in inclement winter weather. WADS focuses exclusively on challenging conditions such as heavy snowfall and occasional white-out scenarios, providing a robust platform for testing and development. WADS comprises images captured across diverse conditions, encompassing variations in road surfaces, weather, lighting, and terrain types, etc.
License
This data is made available under the Creative Commons Attribution-NonCommercial-ShareAlike license. You are free to share and adapt the data, but have to give appropriate credit and may not use the work for commercial purposes.
Maintainers
- Yiming Yang yimingya@mtu.edu
- Jeremy P. Bos jpbos@mtu.edu